▍ 泊车辅助
▍ 驻车雷达系统
驻车雷达系统是车辆的安全辅助装置,以警示音告知驾驶员车辆前后部障碍物的情况,帮助驾驶员判断前后方障碍物的距离,提高驻车安全。
▍ 前驻车雷达

前驻车雷达安装在车辆前保险杠上(共 6 个)。
▍ 后驻车雷达

后驻车雷达安装在车辆后保险杠上(共 6 个)。
▍ 雷达报警范围
前驻车雷达的最远报警范围为120 厘米,后雷达的最远报警范围为 150 厘米。
不同障碍物距离雷达报警方式如下表所示:
| 类别 | 前雷达 | 后雷达 | 显示颜色 | 提示音 |
|---|---|---|---|---|
| 报警范围 | 91 ~ 120 厘米 | 91 ~ 150 厘米 | 绿色 | 每秒 1 次 |
| 61 ~ 90 厘米 | 61 ~ 90 厘米 | 黄色 | 每秒 2 次 | |
| 36 ~ 60 厘米 | 36 ~ 60 厘米 | 黄色 | 每秒 4 次 | |
| 0 ~ 35 厘米 | 0 ~ 35 厘米 | 红色 | 长鸣 |
注:因考虑到备胎等因素,并结合实际应用,后雷达距离显示数值最大为130厘米。
- 档位切入 P 档后,驻车雷达系统不工作。
- 拖挂房车模式下,后驻车雷达功能不可用。
- 车辆在过凹凸不平的路面,草地时可能会产生一定的误报现象,驾驶员可以借助 540 环视系统判断是否可以通过障碍物。
- 恶劣天气(如雨、雪等),雷达系统可能会误报警。
- 雷达系统受周围环境中各类声波(包含但不限于喇叭声音、排气声、刹车声等)和电磁波的干扰可能会出现误报的现象。
- 前后保险杠表面脏污、被遮挡、被磕碰或破损,会影响驻车雷达对周边环境的探测,请及时处理。
- 环境温度过高或者过低,雷达系统可能会误报警或者漏报警。
- 雷达系统可能无法探测到较矮小的、保险杠下的、离车辆太近或太远的物体,无法探测到悬空的物体。
- 障碍物是铁丝网、篱笆、柱子、绳索、购物车等无法反射有效声波的细小物体时,雷达系统识别效果可能下降或不识别。
- 障碍物为锥状物体或表面倾斜物体,墙角、立柱、车辆尾部等直角类物体时,雷达系统识别效果可能下降或不识别。
- 雷达系统不会每次都检测到车辆附近的行人、儿童或动物。
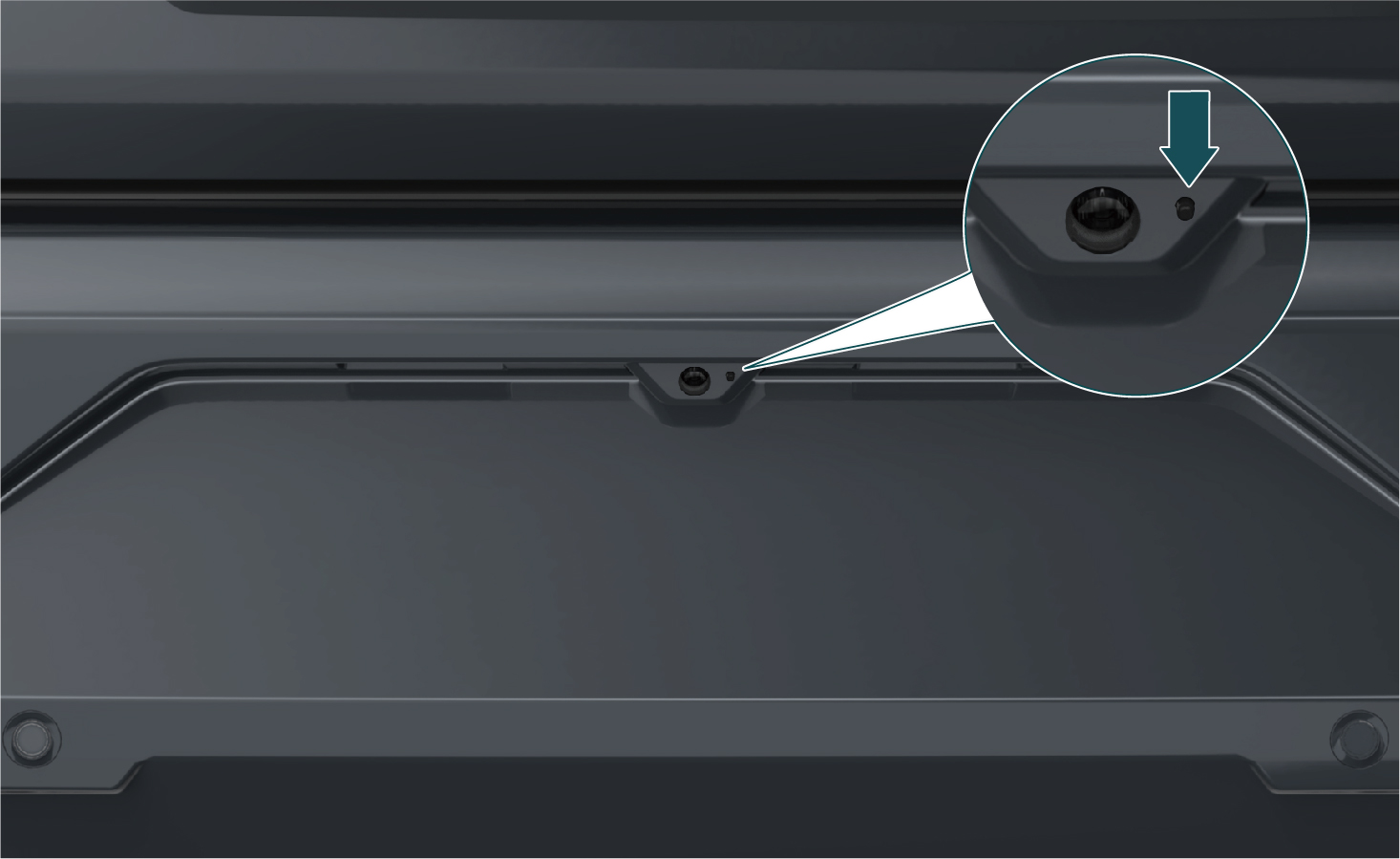
- 如需安装车衣,请对上图雷达传感器位置进行破孔操作,使传感器完全露出,确保孔洞周围车衣平整无毛刺,避免遮挡雷达传感器而影响车辆探测精度。为避免车辆划伤,请联系猛士汽车体验中心进行专业操作。
- 驻车雷达系统不能替代驾驶员的观测,驾驶员始终有责任对车辆周围进行检查。
▍ 540°全景影像系统
540°全景影像系统,采用 4 个车外摄像头,对车辆周围环境进行拍摄,并通过中控屏显示,实时为驾驶员提供车辆周围环境信息,辅助驾驶员安全泊车入位或通过复杂路况。
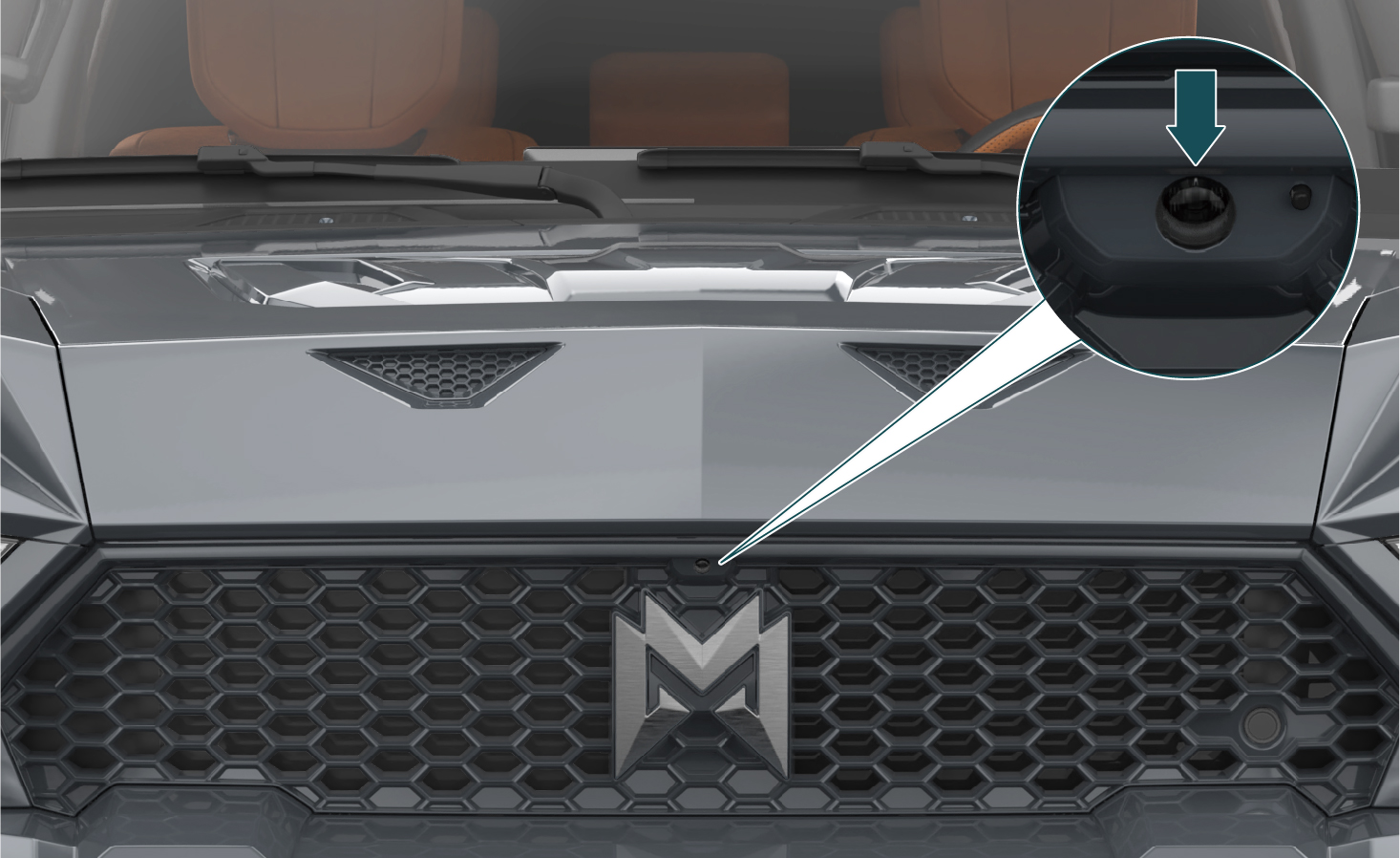
前视摄像头位于前格栅车标上方,用于摄制车辆前部区域。
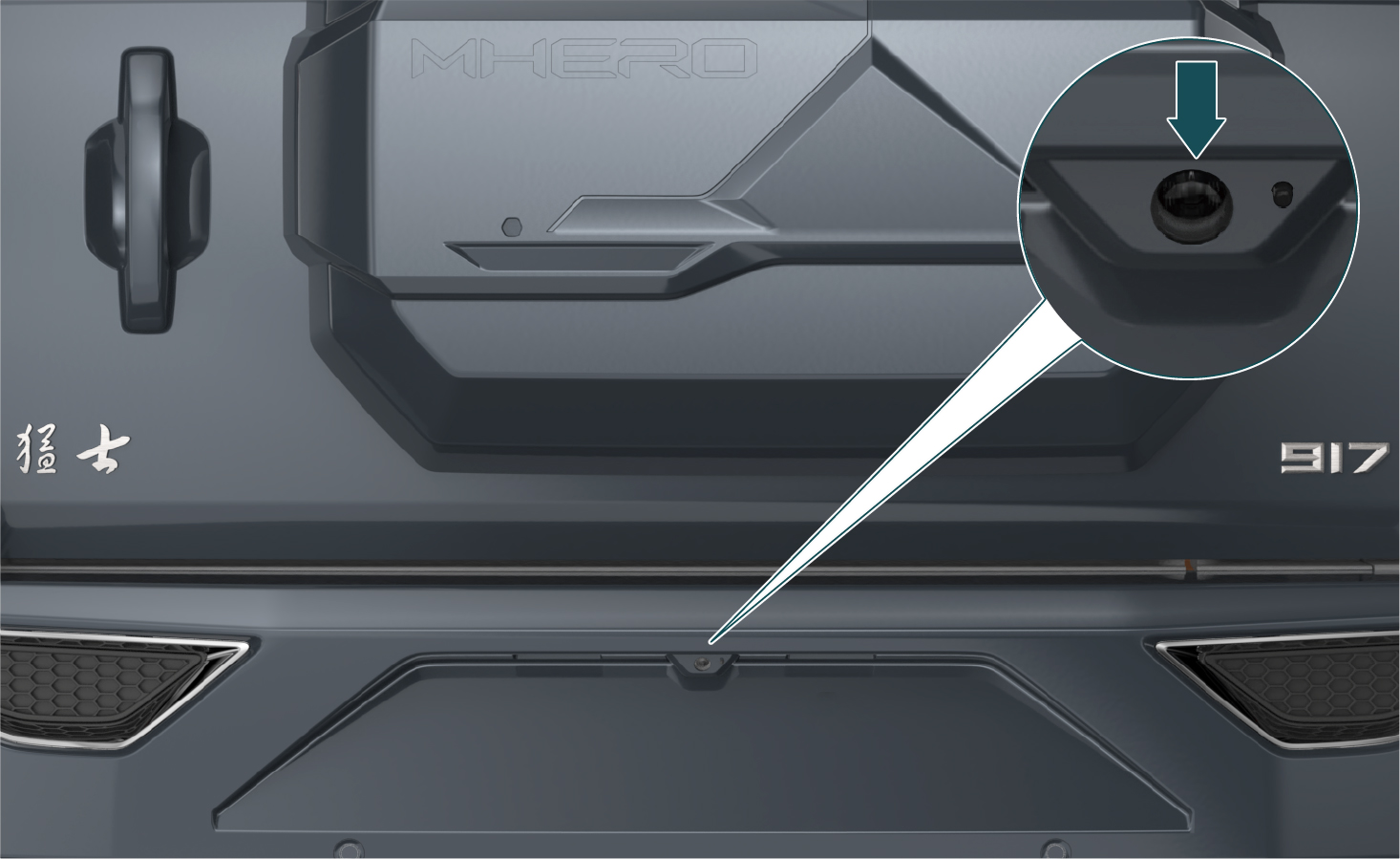
后视摄像头位于两个牌照灯之间,用于摄制车辆后部区域。

左、右摄像头位于左、右后视镜外侧底部,用于摄制车辆侧面区域。
- 应始终保持摄像头表面干净。清洁前摄像头时,应使用柔软、洁净的干布,避免刮伤摄像头。
- 摄像头存在一定盲区,驾驶车辆或泊车时,必须注意车辆周围环境。
▍ 开启 / 关闭 540°全景影像系统
▍ 档位切换
启动开关(START / STOP)开启时:
档位切入 R 档且车速低于 25 km/h,540°全景影像系统自动开启。
档位切入 P 档,540°全景影像系统自动退出。
▍ 按键控制
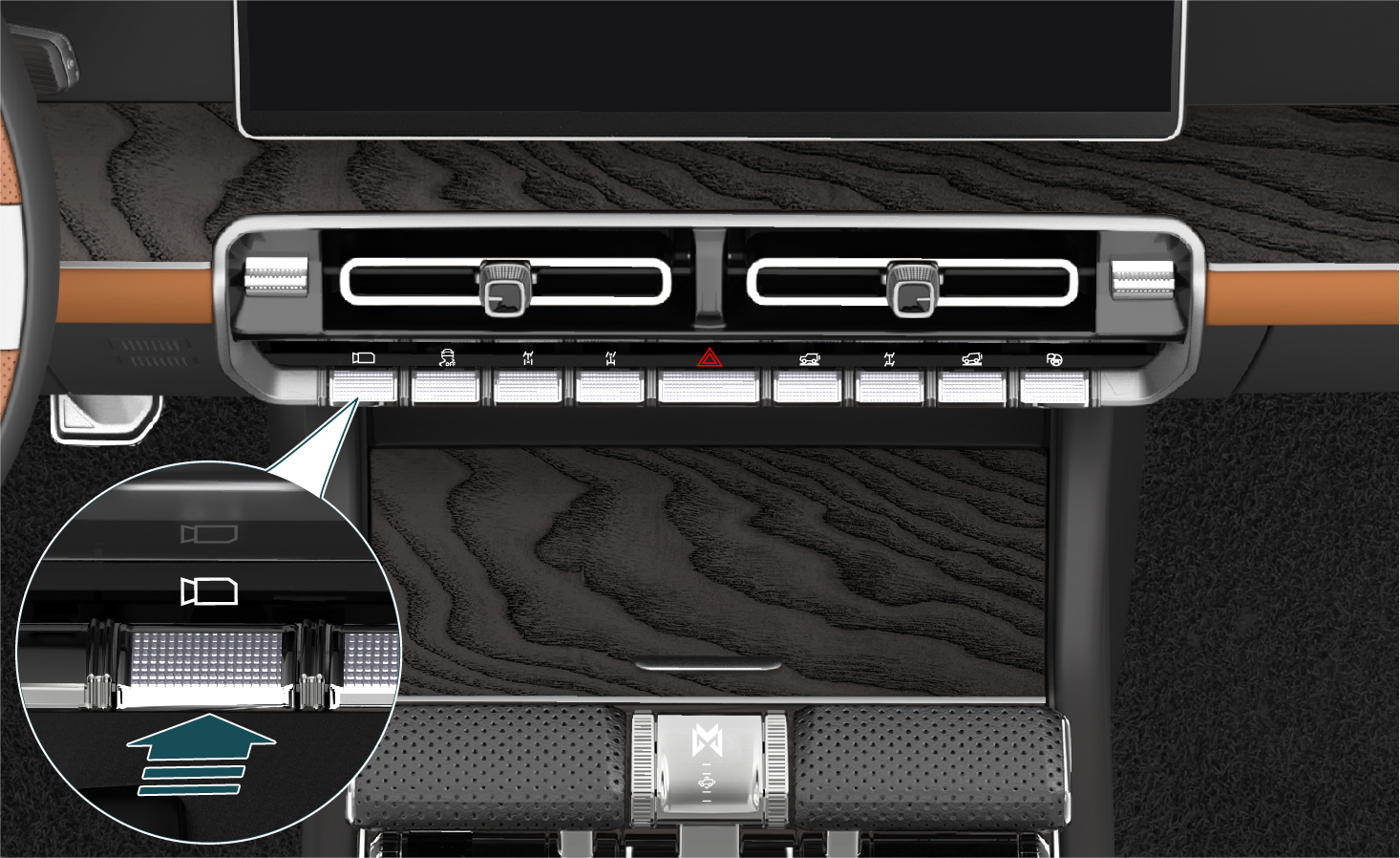
启动开关(START / STOP)开启时:
按下按键,且车速低于25 km/h,540°全景影像系统开启。
再次按下按键或车速超过25 km/h,540°全景影像系统关闭。
▍ 转向触发
在 540°全景影像系统设置界面,选择开启 / 关闭转向灯激活全景影像功能。功能开启后,当转向灯开启且车速低于 25 km/h 时,540°全景影像系统自动开启。关闭转向灯,540°全景影像系统自动关闭。
- 540°全景影像系统开启时,中控屏会显示车辆周围拍摄的画面,并显示相应辅助线。
- 540°全景影像系统摄像头表面脏污、被遮挡、被磕碰或破损,会影响车辆周围环境的拍摄,请及时处理。
- 应始终保持摄像头表面干净。清洁前摄像头时,应使用柔软、洁净的干布,避免刮伤摄像头。
▍ 中控屏开启
在中控屏全应用界面,点触全景影像按键,开启 540°全景影像系统。
系统工作后,进入全景影像视图界面,可进行如下操作或查看提示信息:
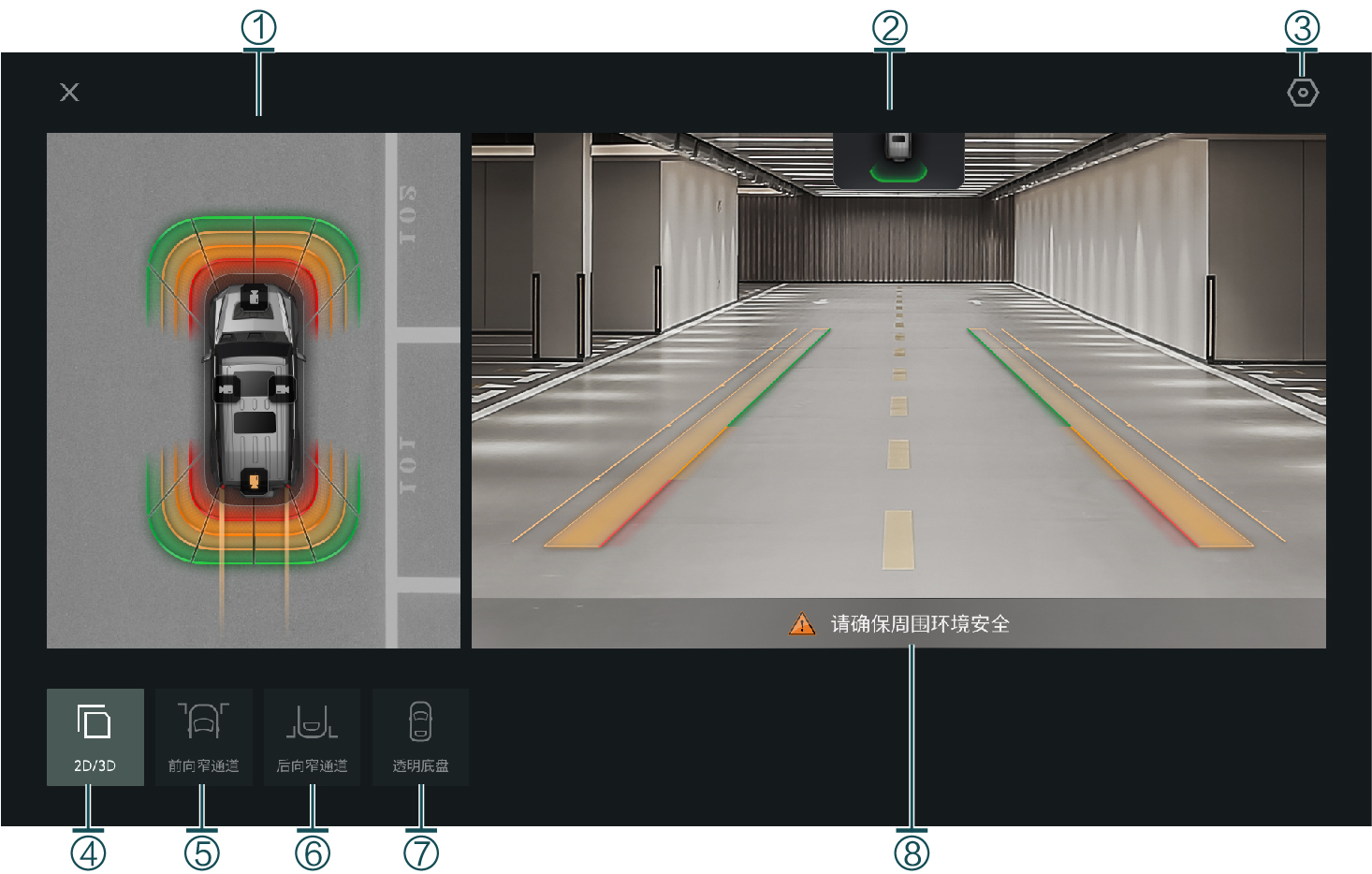
① 全景视角视图
② 单侧视角视图
③ 设置
④ 显示模式切换( 2D / 3D )
⑤ 前向窄通道
⑥ 后向窄通道
⑦ 透明底盘
⑧ 安全文字提醒
▍ 全景影像设置
点触“设置”图标,弹出全景影像功能设置界面,可设置拖车线、雷达信号显示、转向灯激活、雷达激活、雷达报警音功能的开启 / 关闭。
转向灯激活功能开启时,当打开左 / 右转向时,全景影像系统自动显示全景影像。
雷达激活功能开启时,当雷达报警时,全景影像系统自动显示全景影像。
雷达信号显示功能开启时,当雷达报警且全景影像系统显示时,全景影像系统界面叠加雷达盾牌显示。
540 辅助线功能开启时,在全景画面 +2D 单视图模式下,前单视图、后单视图画面中叠加动态辅助线:
红色线段:距离车辆前/后保险杆约 0 m~ 0.5 m,为警戒区域,驾驶员应立即停车;
黄色线段:距离车辆前/后保险杠约 0.5 m~ 1.5 m,为缓冲区,提醒驾驶员控制车速;
绿色线段:距离车辆前/后保险杠约 1.5 m~ 3 m,为安全区域;
两边线宽距离车身左右两侧各约 0.2 m。
在全景画面 +2D 单视图模式下,当方向盘转动时,画面中动态辅助线 随方向盘角度变化而变化,并预指向车辆运动的大致轨迹。
▍ 透明底盘
在 540°全景影像系统界面,点触透明底盘按键,可开启 / 关闭透明底盘功能。开启后,全景影像界面的车模呈透明状态,在透明车模状态下,可看到车底的车道线、减速带、障碍物与井盖等。
▍ 摄像头清洗

当前后摄像头被污渍遮住视野,驾驶员不方便下车进行擦拭时,可以直接喷出洗涤剂进行清洗。
后风窗洗涤系统开启时,前 / 后摄像头清洗功能自动开启。
- 540°全景影像系统不能代替驾驶员对车辆周围环境的安全确认,只能辅助驾驶员对车辆周围环境观察,驾驶员需时刻注意道路环境,始终对安全驾驶负责。
▍ 全自动泊车
全自动泊车系统采用视觉和超声波融合的方式识别停车位以及障碍物的信息。系统对识别到的环境数据进行处理并规划泊车路径,控制车辆自动进行前进、后退、转向、刹车等操作,将车辆泊入 / 泊出停车位。
- 全自动泊车可识别地面划线车位,包括标准的水平线车位、垂直线车位、斜列线车位;也可识别空间车位,例如两辆车中间的可供泊车的车位,包括水平空间车位、垂直空间车位。
▍ 开启 / 关闭全自动泊车
▍ 按键控制

按下全自动泊车按键,开启全自动泊车功能。开启后,根据中控屏显示的图形、文字提示操作,完成自动泊车。
全自动泊车功能启用条件:
超声波雷达传感器无故障。
环视摄像头无故障。
驾驶模式为标准或运动模式。
全自动泊车辅助系统及关联系统无故障。
所有车门关闭。
▍ 泊入
- 启动车辆,切入 D 档,按下全自动泊车按键
.9592612e.png) ,启动全自动泊车功能,系统自动进入搜索车位界面;
,启动全自动泊车功能,系统自动进入搜索车位界面; - 将车辆车速控制在 25km/h 以内, 并保持车辆直线向前行驶,系统开始寻找车位,当系统搜索到停车位后,中控屏显示“请选择停车位”并显示当前搜索到的备选车位;(当车位不满足泊车要求时,车位颜色为灰色,无法选择)
- 点触中控屏上的可用车位图标,选定所需要泊入的车位;
- 车位选定后,中控屏进入泊车方式选择界面,选择“开始泊车”;
- 选择开始泊车后,中控屏将显示“请松开制动踏板,双手离开方向盘”, 驾驶员确认周边环境安全后,松开制动踏板和双手离开方向盘,系统开始自动将车辆泊入到车位内,直至中控屏显示“泊车入库完成,请接管车辆”,车辆完成停车。
▍ 泊出
- 启动车辆,切入 P 档后,按下全自动泊车按键 ,启动全自动泊车泊出功能;
- 驾驶员确认泊出方向后,点触中控屏上的“左水平泊出”或“右水平泊出”图标,启用全自动泊车出库功能;
- 泊车出库功能启用后,中控屏显示“请松开制动踏板”,驾驶员确认周边环境安全后,松开制动踏板,系统开始自动将车辆泊出车位;
- 泊车出库完成后,中控屏显示“泊车出库完成,请接管车辆”,车辆完成泊车出库后,驾驶员应及时接管车辆。
- 全自动泊车功能出现故障时,中控屏会出现提示信息,请您及时接管车辆并联系猛士汽车体验中心。
▍ 泊车中断
全自动泊车过程中,以下情况将导致泊车暂停:
踩下制动踏板。
踩下加速踏板。
打开任一车门(包括后背门)。
检测到泊车路径上有障碍物。
解开主驾安全带。
推动换档手柄。
如需恢复泊车进程,请按照中控屏上提示操作。
▍ 泊车退出
全自动泊车过程中,以下情况将导致泊车退出:
启用 EPB。
转动方向盘。
泊车路面坡度过大。
自动泊车系统或关联系统故障。
目标车位附近存在障碍物,导致无法规划泊车路径的情况。
车位过小,泊车空间不足。
泊车时间、泊车暂停次数超限。
泊车路径上有较高路沿、减速带,或存在有高度差的路面,出于安全因素考虑,可能无法越过。
▍ 泊车完成
泊车完成时,中控屏上显示泊车完成,请确认档位已切入 P 档且电子驻车制动已启用后,再进行车辆下电锁止操作。
▍ 遥控泊车
驾驶员通过猛士汽车APP在距离车辆10米左右范围内,进行远程启动车辆、遥控车辆进行自动泊车。
手机遥控泊车可支持以下泊车方式:水平泊入、垂直泊入、斜列泊入。
▍ 猛士汽车 APP 遥控泊车
▍ 遥控泊入
- 启动车辆,切入 D 档,在车速小于 25 km/h时按下全自动泊车按键,启动全自动泊车功能;
- 搜索到车位后,踩下制动踏板使车辆停止,并选择目标车位,中控屏自动跳转到泊车方式选择界面;
- 在中控屏泊车方式选择界面,选择“遥控泊车”方式;中控屏提示:请挂P档,请全体人员下车,打开手机 APP,开始遥控泊车;
- 驾驶员根据中控屏提示将车辆切入 P 档并拉起 EPB,携带手机和随身物品下车使用遥控泊车功能。
- 使用遥控泊车功能前,请您先打开猛士汽车APP,登录车主账号,并将手机蓝牙与车辆蓝牙连接成功。
- 首次使用手机遥控泊车功能时,系统会弹出免责声明,请您仔细阅读。
▍ 遥控泊出
车辆未启动,驾驶员通过猛士汽车 APP 在车外启动车辆。在 APP 界面点触遥控泊车,并选择泊出方向后,可激活遥控泊车功能,系统会规划车辆行驶轨迹,并控制车辆泊出。
- 全自动泊车功能开启时,车辆运动控制功能OFF指示灯会点亮。
- 全自动泊车功能开启后,若车辆处于非P档,系统默认进入泊入模式并开始搜索车位; 若车辆处于 P 档,系统默认进入泊出模式。
- 当只有一个备选车位时,系统将自动选择该车位。
- 以下情况(包括但不限于)可能导致雷达和摄像头功能受限,全自动泊车和遥控泊车功能无法正常工作:
雷达或摄像头表面脏污、破损、错位或被遮挡(如污泥或者冰雪)。
恶劣天气(如光线不足、雾、霾、雨、大雪、冰雹等)。
周围环境温度过高或过低时。
停车线被遮挡、不清晰、磨损、缺失等。
受到其他电器设备或装置的干扰。
- 以下情况(包括但不限于)可能导致搜索车位过程中出现车位误释放,请驾驶员根据实际场景判断,不要激活泊车功能:
离划线车位较远,导致车位内有车的情况下,出现误释放车位的情况。
停车位前或内部有锥筒、警示牌、细杆、低矮圆柱等障碍物。
停车位前或内部有吸收超声波材质的障碍物(如棉服等)。
搜索车位时车速过高,请尽量将车速保持在 10 km/h 以下。
- 以下情况(包括但不限于)可能导致泊车过程中出现急刹,甚至导致出现擦碰等安全风险,请驾驶员保持警惕,随时接管车辆:
目标停车位内或附近有地锁、轮挡、带直角的方柱或路面有坑、不平整。
泊车周围有使用相同频率超声波探头的车辆或有移动物体(如车辆、行人等)干预泊车。
- 以下情况(包括但不限于)可能导致泊车无法按预期的方式运行,甚至产生车辆碰撞风险,请勿使用全自动泊车或遥控泊车:
车辆安装有拖车、雪地防滑链、使用非原装轮胎、胎压过低时。
装载物超出自车车身尺寸范围时。
目标停车位狭窄或立体停车位。
目标停车位附近有细、尖、矮、悬空的物体,如低矮石墩、低矮圆柱、细杆、消防栓等。
目标停车位附近存在减速带、台阶、有高度差路面。
目标停车位附近有沟渠、悬崖、水池等。
天气恶劣,有中到大雪、路面存在积雪、中到大雨、路面存在积水等情况,系统可能无法找到车位,或因无法探测到障碍物导致安全风险。
坡道、车位狭窄的停车位。
目标停车位紧靠路边的栅栏、墙面、路灯、树木、灌木丛、柱子时。
目标停车位附近有客车、货车、卡车、自行车、三轮车或其他特殊车辆时。
- 遥控泊车过程中,若驾驶员距离车辆过远(超过10米),手机与车辆蓝牙连接断开,泊车将暂停。
- 若猛士汽车 APP 泊车界面转为后台运行,或手机出现锁屏 / 熄屏 / 来电等其他干扰现象,遥控泊车进程将暂停。
- 使用遥控泊车时,请保持手机电量充足,尽量关闭手机后台运行程序,以免造成手机卡顿,从而无法及时控制车辆,导致出现安全风险。
- 遥控泊车过程中,驾驶员需时刻观察车辆周边环境,如发现碰撞风险,应及时通过猛士汽车 APP 暂停后上车接管车辆。
- 如猛士汽车 APP 出现异常退出,驾驶员需尽快上车接管车辆。
- 全自动泊车及遥控泊车均不能完全代替驾驶员操控车辆,只能辅助驾驶员停车,驾驶员需要对车辆及人身安全负责。泊车过程中,驾驶员应时刻注意车辆周围环境,否则可能导致安全风险。
← 驾驶辅助 不停车收费系统 ETC →